齿轮系统(Gear System)
齿轮系统是乐高科技模型中最核心的动力转换机制,通过齿轮的啮合传动实现扭矩与转速之间的灵活转换,是几乎所有功能模型不可或缺的基础组件。
概述
齿轮的本质目的是转换功率输入的属性以适应我们的需求。每个电机都有一定的机械功率,由转速和扭矩两个维度组成,使用齿轮可以在两者之间进行按需转换——增加扭矩就必须牺牲转速,反之亦然。传递驱动只是这个转换过程的副产品。一个精心设计的齿轮系统不仅要实现正确的传动比,还要兼顾效率、紧凑性和可靠性。
核心知识
基本传动原理
- 减速(Gearing Down):小齿轮驱动大齿轮,增加扭矩但降低转速,适用于需要大力量的场景
- 加速(Gearing Up):大齿轮驱动小齿轮,增加转速但降低扭矩,适用于需要高速度的场景
- 齿轮比计算:齿轮比 = 从动齿轮齿数 / 驱动齿轮齿数。如 8 齿驱动 24 齿,齿轮比为 3:1(扭矩增大 3 倍,转速降低为 1/3)
- 惰轮(Idler Gear):位于驱动齿轮和从动齿轮之间的中间齿轮,不改变扭矩/速度转换比例,仅改变旋转方向
齿轮啮合规则
正确的齿轮啮合是齿轮系统可靠运行的前提。乐高齿轮的啮合需要注意以下规则:
- 齿距匹配:只有模数(齿的大小)相同的齿轮才能正确啮合。乐高标准齿轮的模数统一为 1.0mm,因此任意两个标准齿轮都可以啮合
- 中心距精确:两个啮合齿轮的轴心距必须精确等于两个齿轮节圆半径之和。距离过大会产生过大的间隙,距离过小会导致齿轮卡死。例如,8 齿和 24 齿齿轮啮合的中心距应精确为 16mm(即 2 个乐高单位)
- 轴向对齐:齿轮应在轴向上对齐,避免仅部分齿面啮合,否则会加速磨损并可能产生异常噪音
- 旋转方向:每增加一级啮合,旋转方向反转一次。偶数级啮合时输出反向,奇数级啮合时输出同向
齿轮比计算实例
以下列举几个常见的齿轮比计算场景:
| 驱动齿轮 | 从动齿轮 | 齿轮比 | 效果 | 适用场景 |
|---|---|---|---|---|
| 8 齿 | 24 齿 | 3:1 | 扭矩 x3,转速 /3 | 中等减速 |
| 8 齿 | 40 齿 | 5:1 | 扭矩 x5,转速 /5 | 大幅减速 |
| 12 齿 | 20 齿 | 1.67:1 | 扭矩 x1.67,转速 /1.67 | 轻度减速 |
| 12 齿 | 36 齿 | 3:1 | 扭矩 x3,转速 /3 | 垂直传动减速 |
| 两级 8:24 串联 | — | 9:1 | 扭矩 x9,转速 /9 | 起重机/绞盘 |
| 三级 8:24 串联 | — | 27:1 | 扭矩 x27,转速 /27 | 超重负载 |
齿轮组的布局与排列
在实际搭建中,齿轮组的布局直接影响模型的紧凑性和传动效率:
- 直线串联:最简单的布局,所有齿轮在同一条直线上依次啮合,结构紧凑但每级都改变旋转方向
- 同轴并列:将不同齿数的齿轮固定在同一根轴上,通过另一根轴上的齿轮组合实现传动,可以在有限空间内实现多级变速
- 行星齿轮:利用差速器壳体作为行星架,太阳齿轮和齿圈之间实现高减速比,是乐高变速箱系统中的核心技术
- 效率原则:使用尽可能少的齿轮和尽可能小的齿轮来实现目标传动比。齿轮越少意味着摩擦损失越小,齿轮越小意味着重量越轻和间隙越可控
乐高齿轮类型概览
| 齿轮类型 | 齿数 | 特点与用途 |
|---|---|---|
| 最小齿轮 | 8 | 体积最小、间隙较大,适合高减速比输入端 |
| 单锥 12 齿 | 12 | 差速器核心部件,紧凑的垂直传动 |
| 双锥 12 齿/20 齿 | 12/20 | 强力可靠,最常用的锥齿轮组合 |
| 16 齿齿轮 | 16 | 支持链条驱动,用途广泛 |
| 24 齿齿轮 | 24 | 变体最多、用途最广的齿轮 |
| 24 齿离合齿轮 | 24 | 过载时自动滑动,是机构保护的重要零件 |
| 36 齿齿轮 | 36 | 最大的锥齿轮,强度出人意料地出色 |
| 40 齿齿轮 | 40 | 最大标准正齿轮,适合大幅减速 |
项目展示图片
基本传动原理
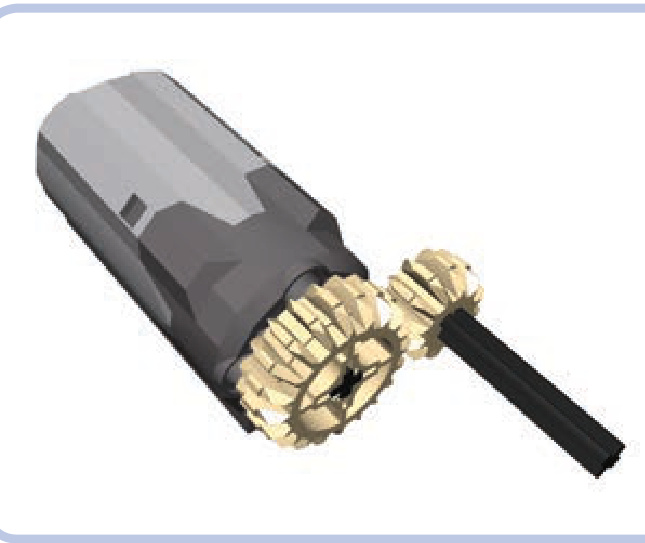
 减速——小齿轮驱动大齿轮,增加扭矩但降低速度
减速——小齿轮驱动大齿轮,增加扭矩但降低速度
 加速——大齿轮驱动小齿轮,增加速度但降低扭矩
加速——大齿轮驱动小齿轮,增加速度但降低扭矩
 驱动齿轮和从动齿轮的标识
驱动齿轮和从动齿轮的标识
齿轮啮合规则与方向
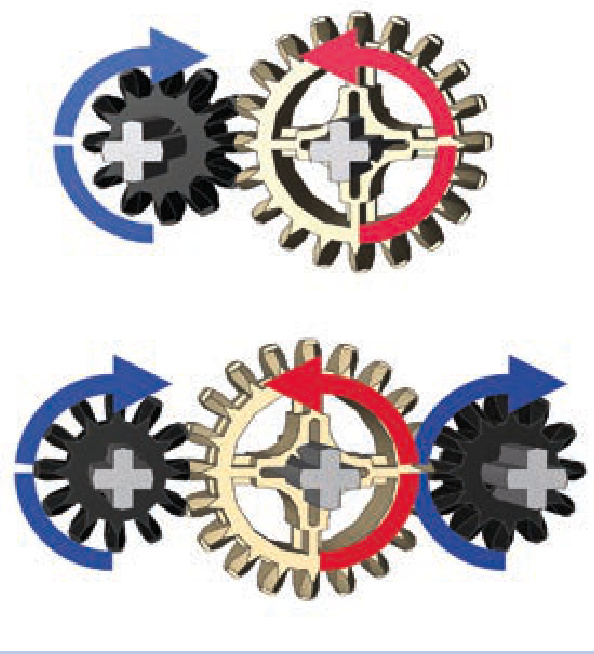 偶数啮合齿轮(左)和奇数啮合齿轮(右)——偶数级反向旋转,奇数级同向旋转
偶数啮合齿轮(左)和奇数啮合齿轮(右)——偶数级反向旋转,奇数级同向旋转
 所有中间齿轮都是惰轮,不影响驱动齿轮和从动齿轮之间的扭矩和速度转换关系
所有中间齿轮都是惰轮,不影响驱动齿轮和从动齿轮之间的扭矩和速度转换关系
齿轮类型与变体
 乐高齿轮及其齿数的全览,涵盖几乎所有常用齿轮类型
乐高齿轮及其齿数的全览,涵盖几乎所有常用齿轮类型
 8 齿齿轮的三种变体,最终变体在齿之间有额外材料层,强度更高
8 齿齿轮的三种变体,最终变体在齿之间有额外材料层,强度更高
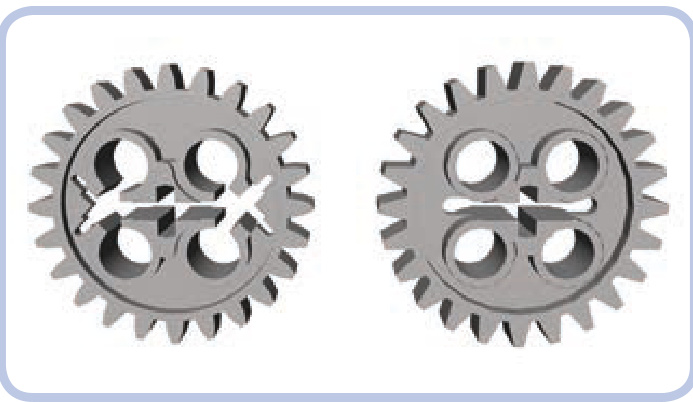 24 齿齿轮最常见的两种变体
24 齿齿轮最常见的两种变体
差速器中的齿轮应用
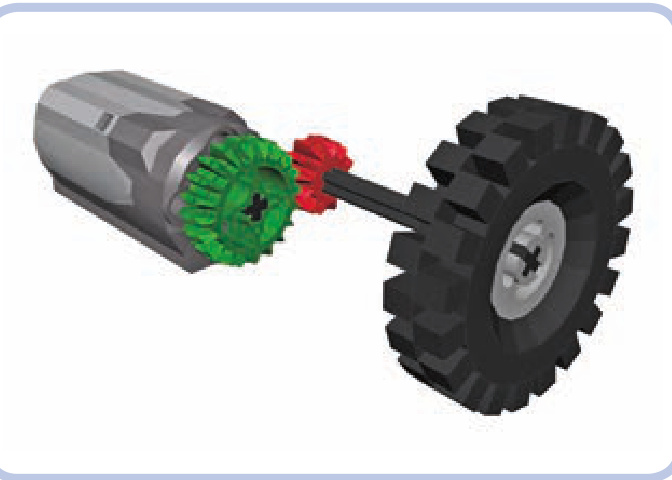
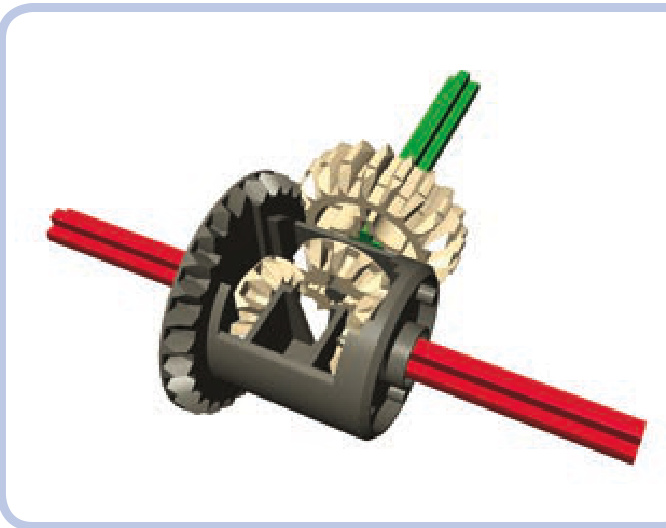 差速器有一个绿色输入轴但两个红色输出轴,展示齿轮系统的功率分配功能
差速器有一个绿色输入轴但两个红色输出轴,展示齿轮系统的功率分配功能