加法器与减法器
利用差速器的特性将多个电机的动力进行组合或分离的特殊机构。加法器将扭矩叠加以获得更强的驱动力,减法器利用速度差实现差速转向,两者都是构建高性能复杂模型的关键技术。
硬耦合的问题
硬耦合(Hard-coupling)是将两个电机直接连接到同一根轴上,强制它们以相同速度旋转。看似合理,实则存在严重隐患:
即使是同一型号的乐高电机,实际输出转速也存在 5% 到 10% 的差异。当两个电机硬耦合时,转速较快的电机会被迫”拖动”转速较慢的电机,导致两个电机都无法在最佳工作点运行。这会带来电机效率降低、发热增加、机械应力增大等一系列问题,极端情况下可能损坏电机或齿轮。
因此,当需要组合多个电机的动力时,应使用加法器机制来避免硬耦合的缺陷。
加法器:扭矩叠加的数学基础
工作原理
加法器利用差速器将多个电机的扭矩进行叠加。每个电机驱动差速器的一个半轴齿轮,输出从差速器壳体获取。差速器会自动平衡两个电机之间的速度差异,使每个电机都能在各自的最佳速度运行,同时它们的扭矩在输出端被叠加。
从数学角度来看,加法器的核心关系如下:
- 扭矩关系:T_output = T_motor1 + T_motor2(输出扭矩等于两个电机扭矩之和)
- 速度关系:差速器自动调节,使两个半轴齿轮的转速满足约束条件
这意味着使用加法器耦合两个相同电机,理论上可以获得翻倍的输出扭矩,同时保持与单个电机相同的工作转速。这种”自动变速器”般的效果使每个电机都能发挥最大效能。
多电机耦合
通过串联多个差速器,可以组合三个或更多电机的扭矩:
- 三电机系统:使用两个差速器,第一个组合电机1和2,第二个将其输出与电机3组合
- 四电机系统:使用三个差速器,形成两级加法网络
需要注意,每个差速器阶段都会引入约 5-10% 的效率损失。实际搭建中,超过 3-4 个电机的加法系统收益递减,增加的摩擦和复杂性开始抵消额外电机带来的扭矩增益。
应用场景
- 超重型履带车辆:组合多个电机扭矩以获得卓越的牵引力
- 大型起重设备:极高扭矩用于提升重物
- 空间受限的模型:使用多个小型电机代替单个大型电机,布局更灵活
减法器:差速转向系统的实现
工作原理
减法器是加法器的”反向”应用:不是将扭矩叠加,而是利用两个输入的速度差来产生输出。当两个电机以相同方向和速度驱动时,输出为零;当速度不同时,输出与速度差成比例;当方向相反时,输出最大。
坦克转向系统
减法器最常见的应用是履带车辆的差速转向。与传统的”刹车一条履带来转向”方式不同,差速转向始终保持两条履带都有动力,更加高效且逼真:
- 两个电机同速同向旋转时,车辆直线前进
- 两侧电机出现速度差时,车辆向慢速侧转向
- 两个电机反向旋转时,车辆原地旋转(零半径转向)
- 通过精确控制速度差,可以实现从宽弧转弯到原地旋转的无级转向
纵向与横向减法器
- 纵向减法器:输入和输出轴沿车辆纵向排列,适合传统布局的坦克和履带车辆
- 横向减法器:输入轴垂直于车辆长度方向,输出沿纵向传递。需要额外的锥齿轮组改变传动方向,适合需要优化内部空间的紧凑模型
设计要点
齿轮与差速器选择
- 优先使用新型28齿差速器,封装在 5x7 框架内以确保结构稳固
- 高扭矩场景使用双锥齿轮以减少齿隙并提高承载能力
- 关键轴应在至少两个位置有支撑,理想情况下三个
效率优化
- 尽量减少传动阶段,每个齿轮啮合损失约 5-10% 的动力
- 使用适当尺寸的齿轮,避免小齿轮承受过大扭矩
- 确保轴正确对齐以减少摩擦损失
加固建议
- 使用 5x7 或更大的无凸点框架支撑差速器壳体
- 电机安装座需要足够牢固,防止反作用力导致安装座变形
- 所有高负载轴使用轴套(bushing)防止轴向窜动
项目展示图片
硬耦合与加法器基础
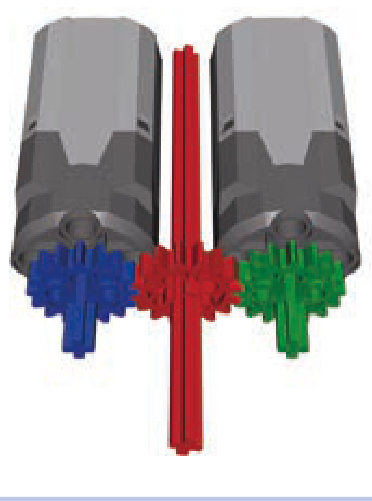 硬耦合——两个电机直接连接到同一根轴上强制同速旋转
硬耦合——两个电机直接连接到同一根轴上强制同速旋转
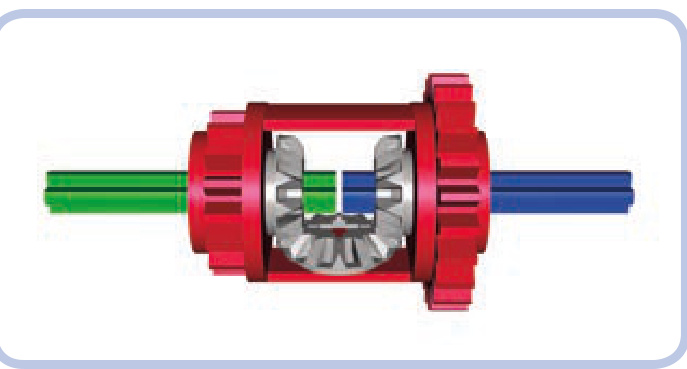 差速器的三个元素——两根轴(绿色和蓝色)和差速器壳体(红色)
差速器的三个元素——两根轴(绿色和蓝色)和差速器壳体(红色)
加法器设计实例
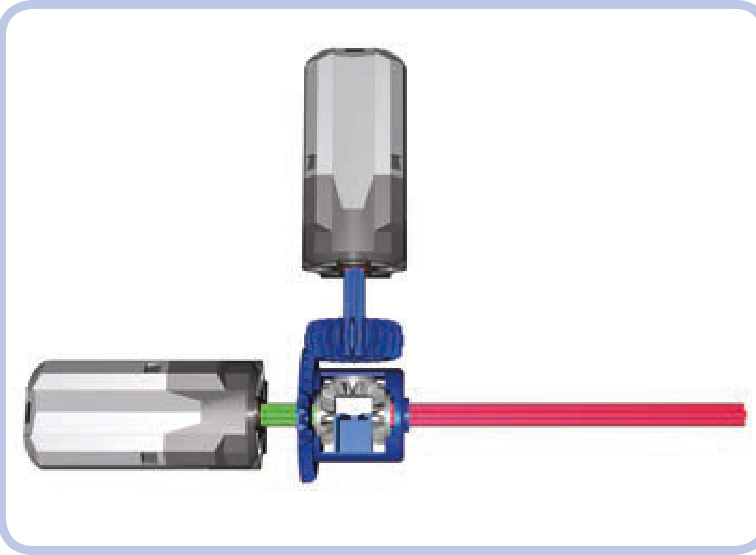
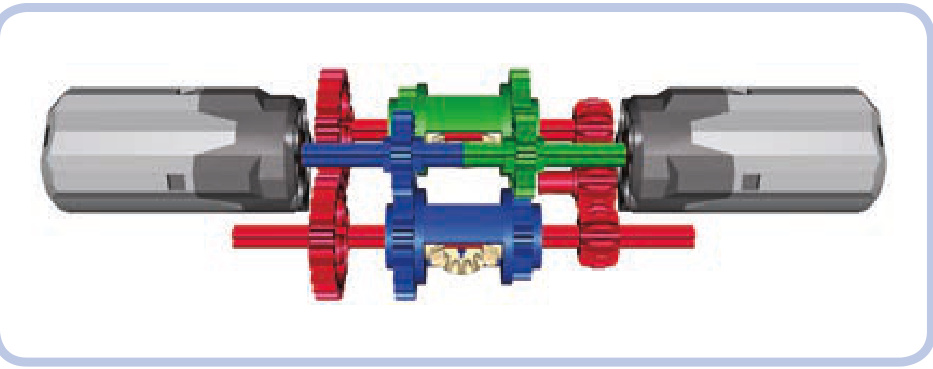
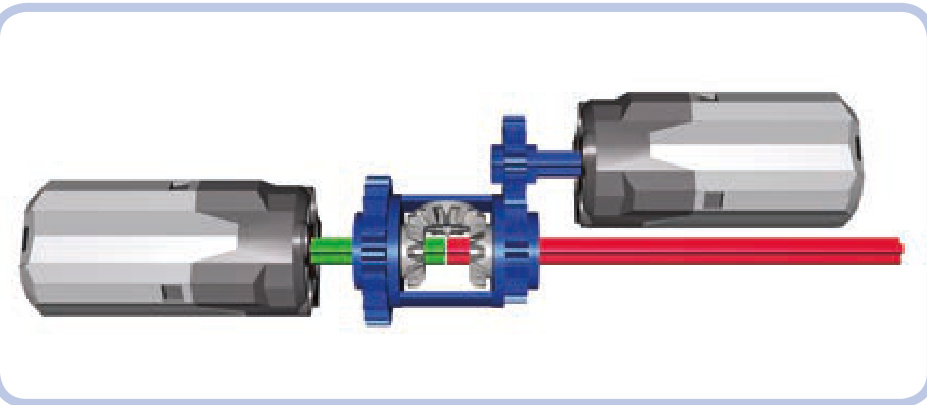 两个 PF Medium 电机驱动差速器壳体(蓝色)和一根轴(绿色),另一根轴(红色)为输出
两个 PF Medium 电机驱动差速器壳体(蓝色)和一根轴(绿色),另一根轴(红色)为输出
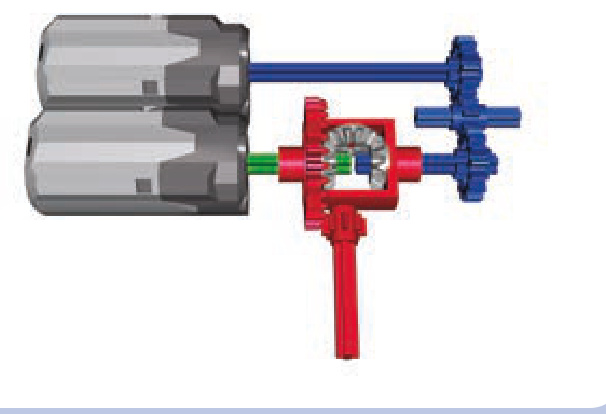
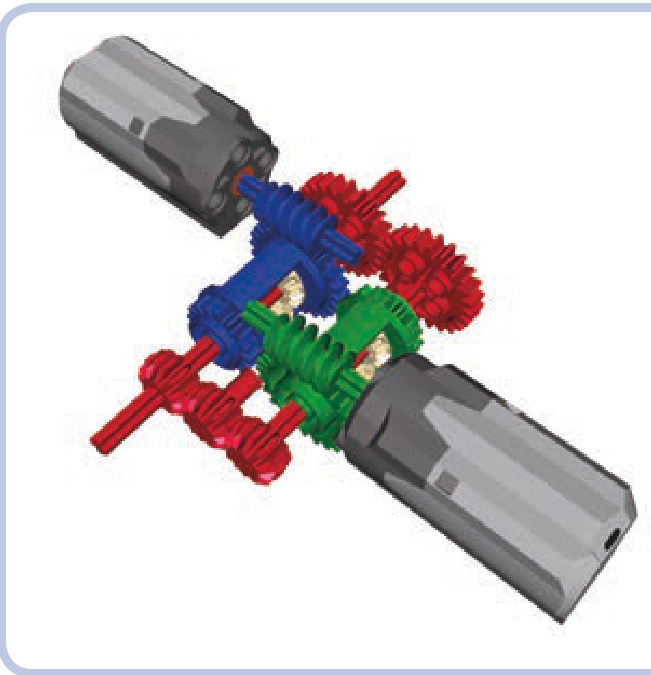
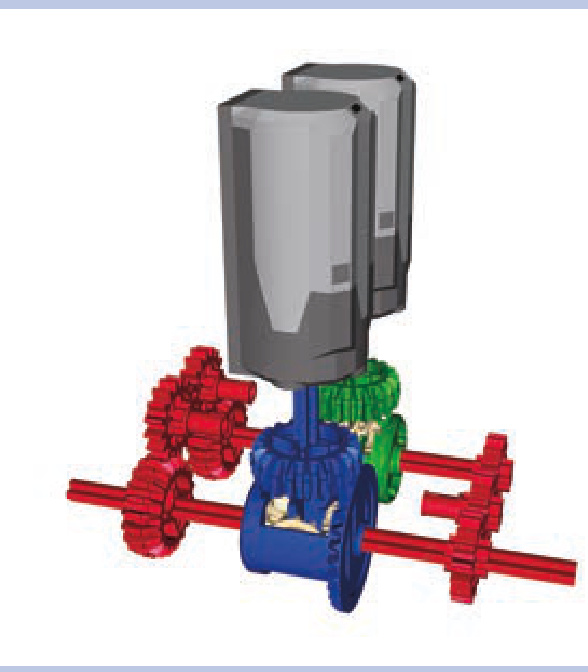
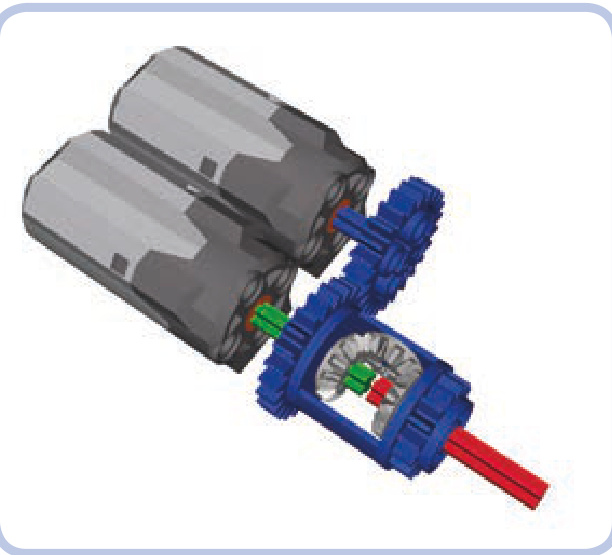 与上图相同的加法器设置,但电机并排放置
与上图相同的加法器设置,但电机并排放置
 使用最新型差速器的加法器设计
使用最新型差速器的加法器设计
 使用最老型差速器的加法器设计
使用最老型差速器的加法器设计
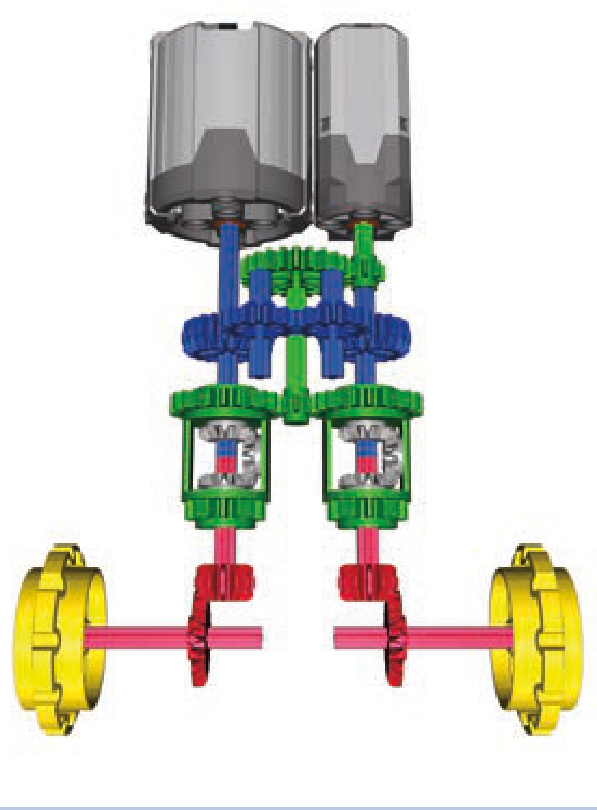
 三个差速器串联耦合四个电机——每增加一个电机需要一个额外差速器
三个差速器串联耦合四个电机——每增加一个电机需要一个额外差速器
减法器设计
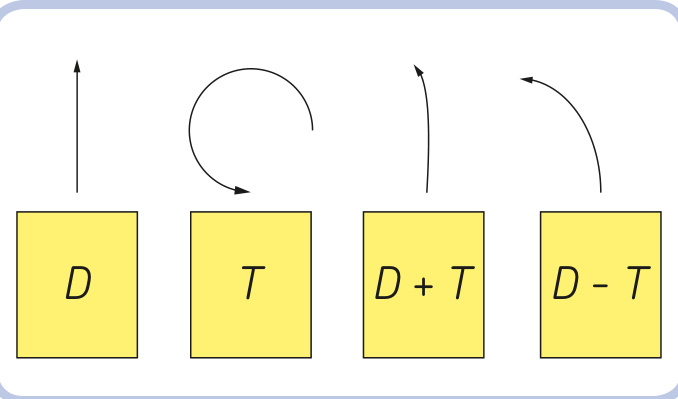 减法器输入驱动的履带车辆运动路径——D 为驱动电机,T 为转向电机
减法器输入驱动的履带车辆运动路径——D 为驱动电机,T 为转向电机
 纵向减法器——适合长窄车身的履带车辆
纵向减法器——适合长窄车身的履带车辆
 横向减法器——比纵向版本更紧凑
横向减法器——比纵向版本更紧凑
 使用蜗轮传动的横向减法器——防止一个电机驱动另一个电机
使用蜗轮传动的横向减法器——防止一个电机驱动另一个电机
 使用新型 28 齿差速器的全无凸点横向减法器
使用新型 28 齿差速器的全无凸点横向减法器