转向系统
轮式车辆的转向是机械设计中的经典课题。虽然乐高模型在尺寸和重量上远小于真实车辆,但掌握转向系统的工作原理对于搭建出操控性出色的模型至关重要。
基本乐高转向系统
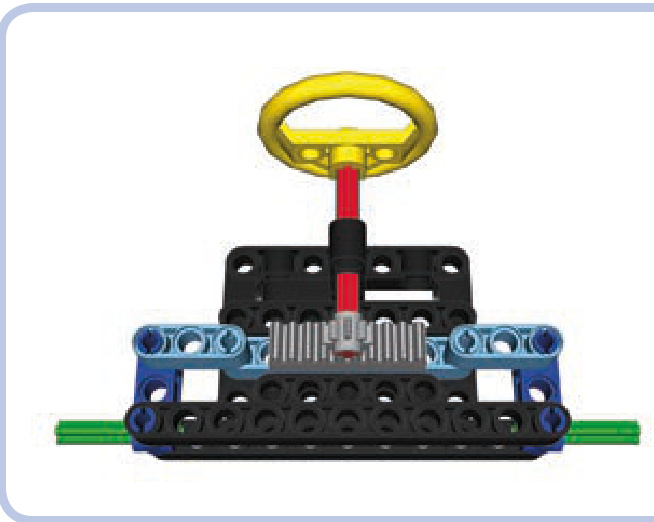
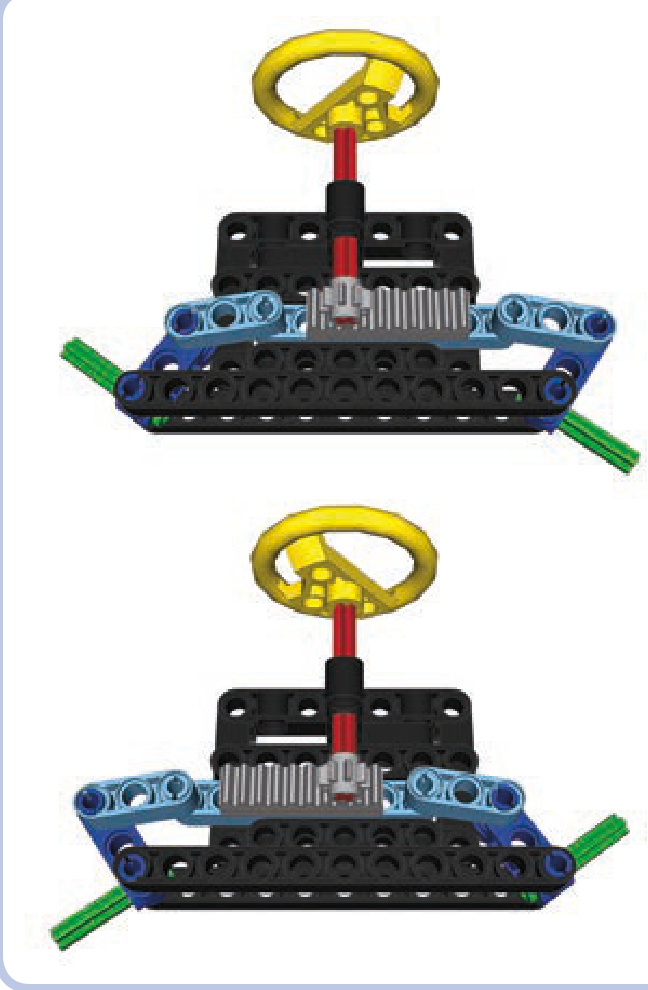
乐高科技模型中的转向系统由几个核心部件组成:转向轴将方向盘或电机连接到齿条与小齿轮组,齿条在齿轮驱动下左右滑动,再通过转向臂和拉杆带动车轮偏转。
齿条脱离问题与解决方案
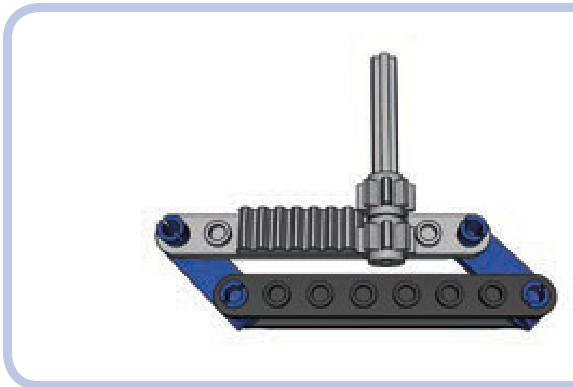
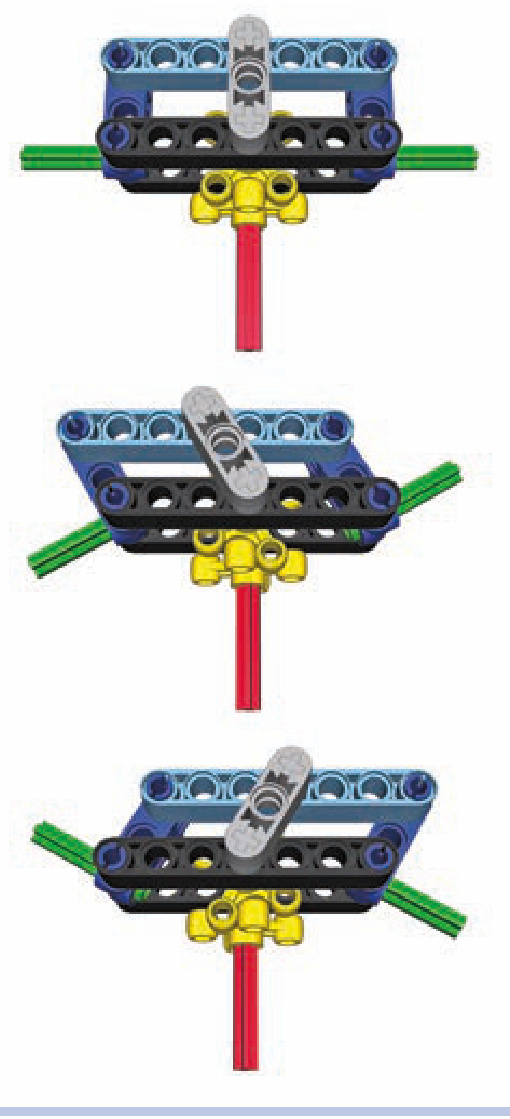
转向臂转动时,连接拉杆的销沿圆弧运动,导致齿条不仅左右滑动还会前后位移。这一纵向位移可能使齿条脱离小齿轮。常用解决方案有四种:双小齿轮互锁(结构最简单但占用宽度)、居中放置小齿轮(让齿条前后行程对称分布在齿轮两侧)、三件式拉杆(中间齿条部分纵向行程为零,最为可靠但整体较宽)、以及杠杆代替齿条(使用旋钮轮加短杠杆传递运动)。
阿克曼转向几何详解
核心原理
当车辆转弯时,内侧车轮和外侧车轮行驶轨迹的半径不同——外侧半径等于内侧半径加上车辆轮距。如果两个前轮以完全相同的角度偏转,外侧轮胎将被迫沿不正确的弧线滚动,产生额外的滑动摩擦和轮胎磨损。阿克曼转向几何通过让内侧车轮的偏转角大于外侧车轮来解决这个问题,使两个车轮的轴线延长线都交于后轴延长线上的同一点——即瞬时转向中心。
乐高中的实现方法
在乐高模型中实现阿克曼几何主要有两种途径。第一种是使用特殊转向臂,将其枢轴点偏移设计,使转向臂的延长线指向后轴中心。官方8865和8880超级跑车套装均采用此方案,但这些特殊零件如今已相当稀有。第二种是使用三件式拉杆,通过加长中间齿条段并使两侧拉杆呈角度布置来实现差动转向效果,这种方案对拉杆施加的力较大,需要确保中心齿条有可靠的导向约束。
实际意义
对于乐高模型而言,由于重量和速度有限,阿克曼几何带来的操控改善并不显著。但在大型重型模型中,正确的转向几何可以明显减少转向阻力和轮胎磨损。此外,阿克曼几何已成为乐高科技模型中的标志性技术细节,许多建造者将其视为搭建功力的体现。
转向比例的计算方法
转向锁与转向比
转向锁(steering lock)指车轮最大偏转角度,它决定了模型的最小转弯半径。转向比(steering ratio)是方向盘转动角度与车轮偏转角度的比值。在遥控模型中,转向比直接影响操控精度和响应速度。
多轴转向的收敛计算
当模型具有多个转向轴时,各轴的转向角度需要遵循收敛关系。具体而言,各轴到收敛线(垂直于底盘并指向瞬时转向中心的线)的距离之比,决定了它们的转向角度之比。例如,前轴距收敛线13凸点、中轴距7凸点时,中轴的转向角度应为前轴的约60%(7/13的反正切值约28度,占前轴45度的62%)。这一关系可以通过不同尺寸的齿轮或齿轮传动比来实现。
简化方法
如果数学计算令人头疼,可以采用物理模拟法:制作底盘比例模型放在纸上,手动转动车轮指向转弯中心,然后画出延长线并测量角度。这种方法直观且无需复杂计算。
转向回中机构
回中转向在系统释放时自动将车轮返回直行位置,非常适合遥控模型操作。
实现方式
两种主要实现方式各有优劣。曲棍球弹簧零件方案使用内置弹簧的专用零件,与PF中型电机配合实现自动回中,但该零件较为稀有。橡皮筋回中方案则利用橡皮筋挤压两根梁夹紧转向轴上的连接器,电机停止时橡皮筋将连接器推回中位。两种方案都只提供三个有效位置(左转、直行、右转),不适合需要精细转向的慢速模型。
最佳实践
对于大多数模型,使用PF中型电机配合约9:1的齿轮减速比即可获得最佳的速度与精度平衡。回中机构更适合注重操控便捷性的快速模型,而非需要精确路径控制的慢速精细模型。
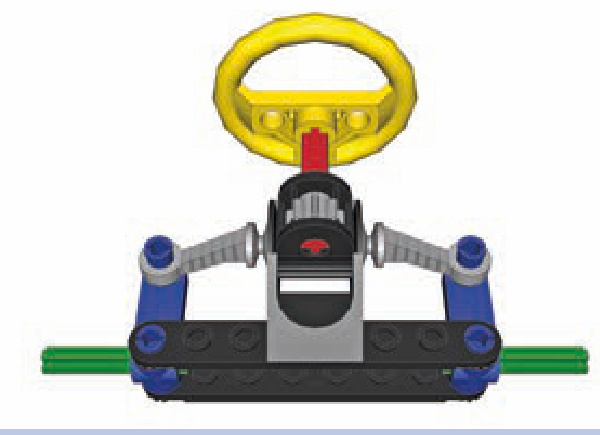 典型的乐高转向机构,黑色为底盘,黄色为方向盘部分。
典型的乐高转向机构,黑色为底盘,黄色为方向盘部分。
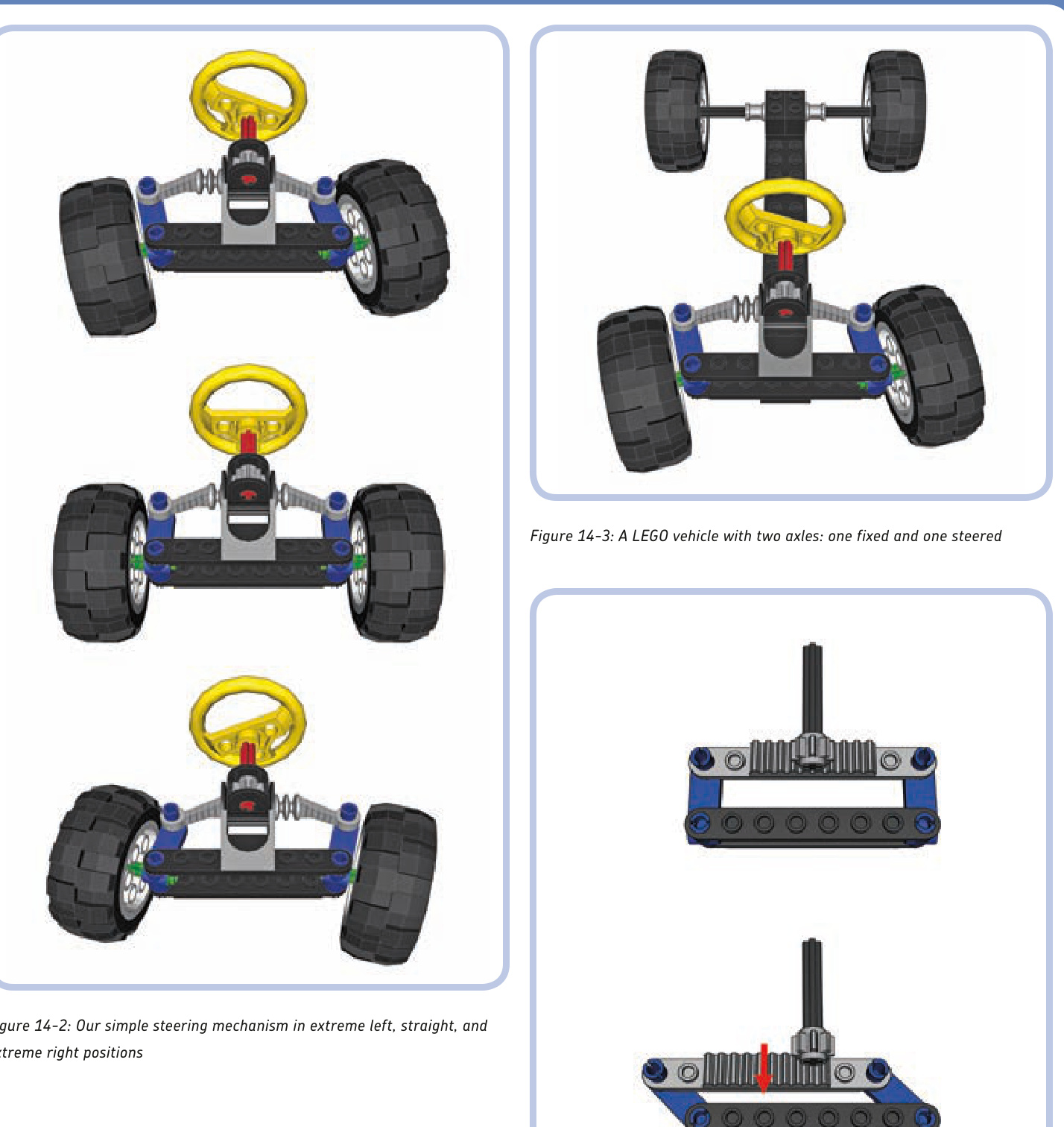 转向臂旋转导致齿条产生纵向位移的示意。
转向臂旋转导致齿条产生纵向位移的示意。
 使用双小齿轮防止齿条脱离的简洁方案。
使用双小齿轮防止齿条脱离的简洁方案。
 三件式拉杆机构,侧面铰接部分适应转向臂的旋转。
三件式拉杆机构,侧面铰接部分适应转向臂的旋转。
 极端转向位置下三件式拉杆的中间部分纵向行程为零。
极端转向位置下三件式拉杆的中间部分纵向行程为零。
 无齿条转向机构,使用旋钮轮和短杠杆传递运动。
无齿条转向机构,使用旋钮轮和短杠杆传递运动。
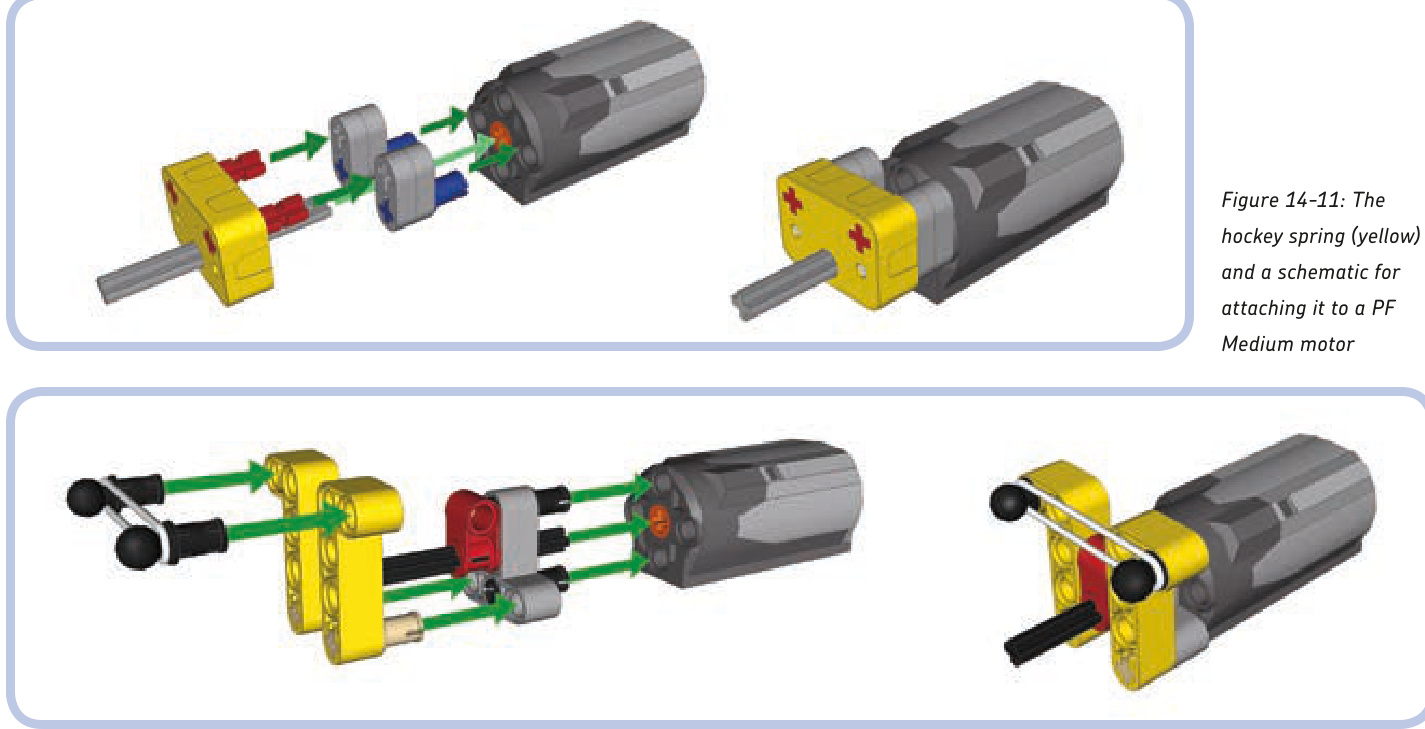 基于橡皮筋的回中转向附件,用于PF中型电机。
基于橡皮筋的回中转向附件,用于PF中型电机。
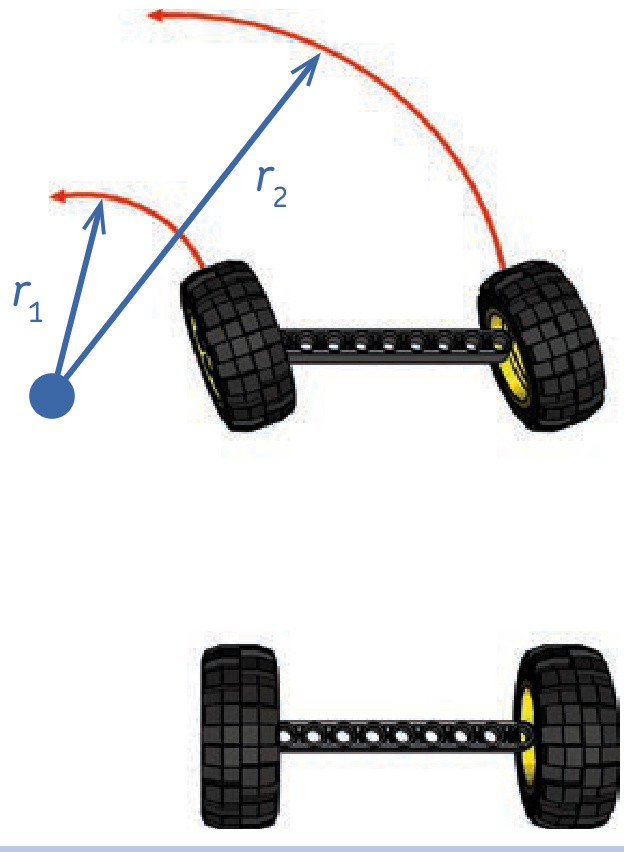 转向车辆内外侧车轮的转弯半径差异示意。
转向车辆内外侧车轮的转弯半径差异示意。
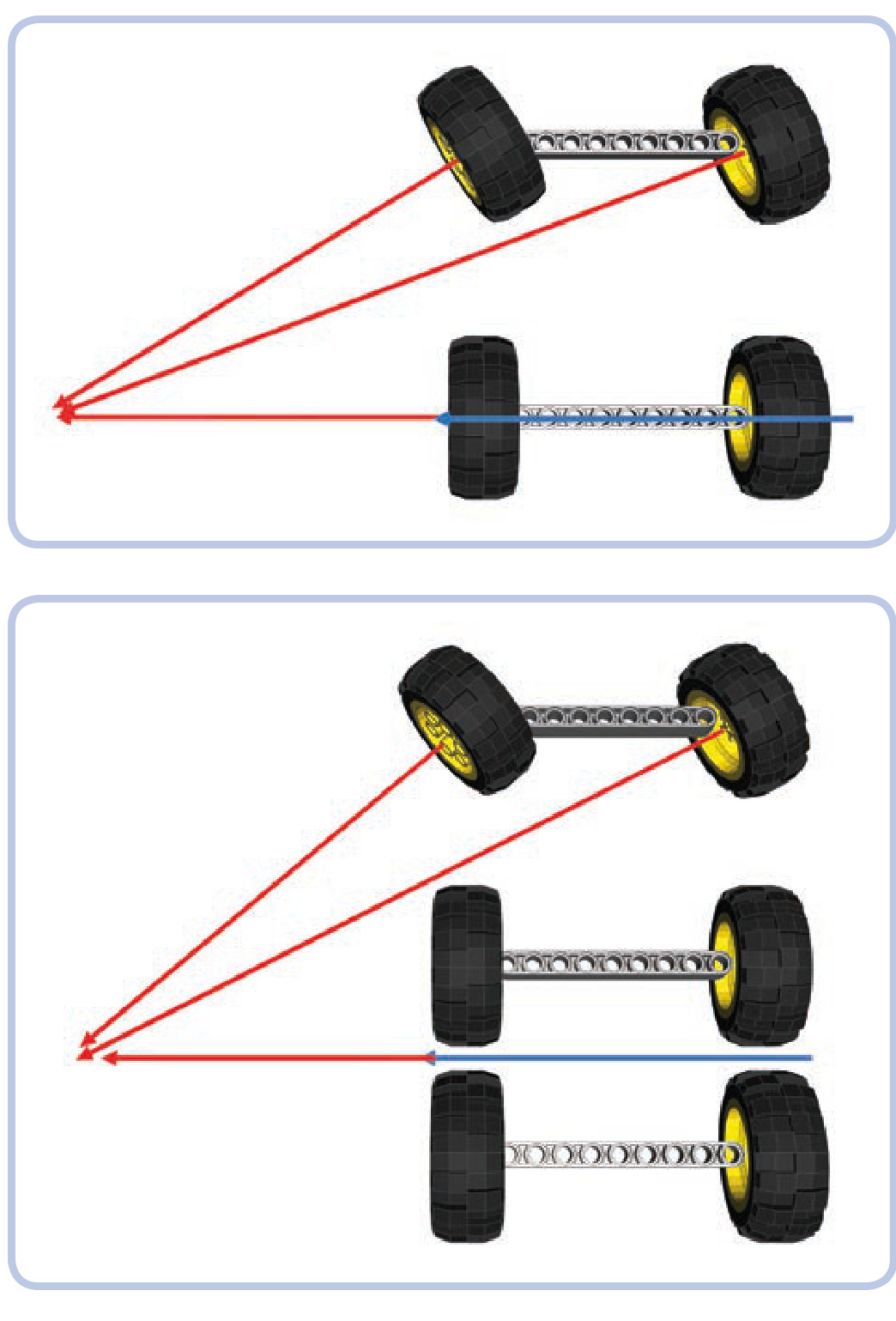 蓝色标记为收敛线——垂直于底盘并指向转弯中心的参考线
蓝色标记为收敛线——垂直于底盘并指向转弯中心的参考线
项目展示图片
典型的乐高转向机构,黑色为底盘,黄色为方向盘部分
转向臂旋转导致齿条产生纵向位移的示意
使用双小齿轮防止齿条脱离的简洁方案
三件式拉杆机构,侧面铰接部分适应转向臂的旋转
极端转向位置下三件式拉杆的中间部分纵向行程为零
无齿条转向机构,使用旋钮轮和短杠杆传递运动
基于橡皮筋的回中转向附件,用于PF中型电机
转向车辆内外侧车轮的转弯半径差异示意
蓝色标记为收敛线——垂直于底盘并指向转弯中心的参考线